Raytracer


The Raytracer was developed for the Advanced Computer Graphics Techniques class in college. This project involves creating a complete system of algorithms to render three-dimensional images using the backward raytracing technique.
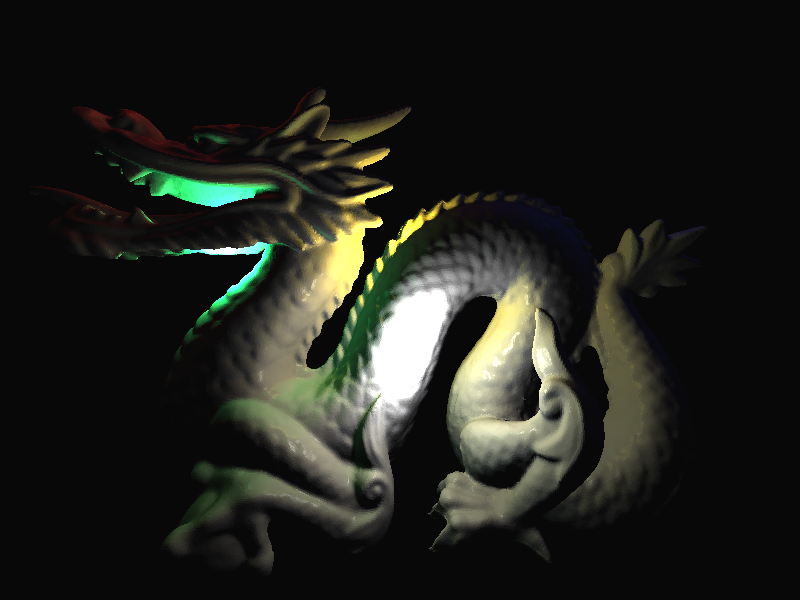
The raytracer simulates light paths as they occur in the real world, rendering effects based on the characteristics of objects. It can generate a high degree of realism, but at a significant computational cost.
Features
The complete list of features of the Raytracer project:
- Rendered scene preview and editing tools
- Apply kernel convolution filters
- Color tools
- Scene normal map, depth map, and edge detection preview
- Scene file loader
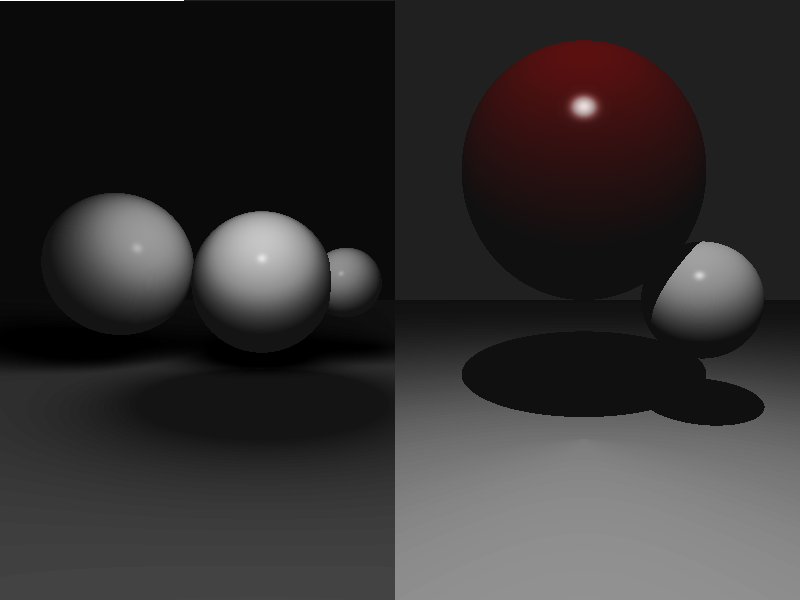
- Basic raytracer architecture (Whitted-style)
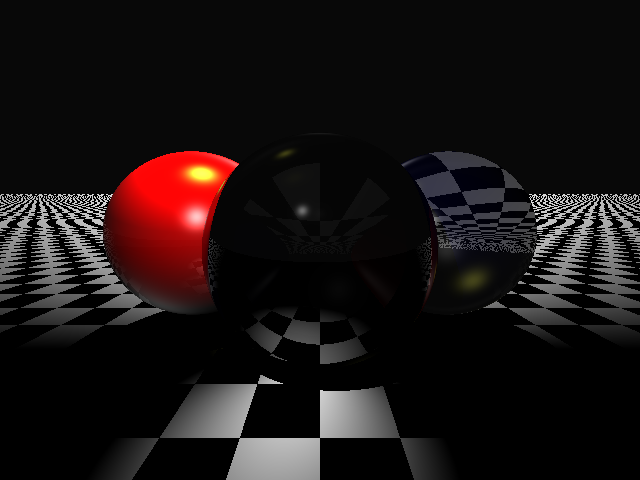
- Fresnel: Reflection and refraction
- Point and directional light
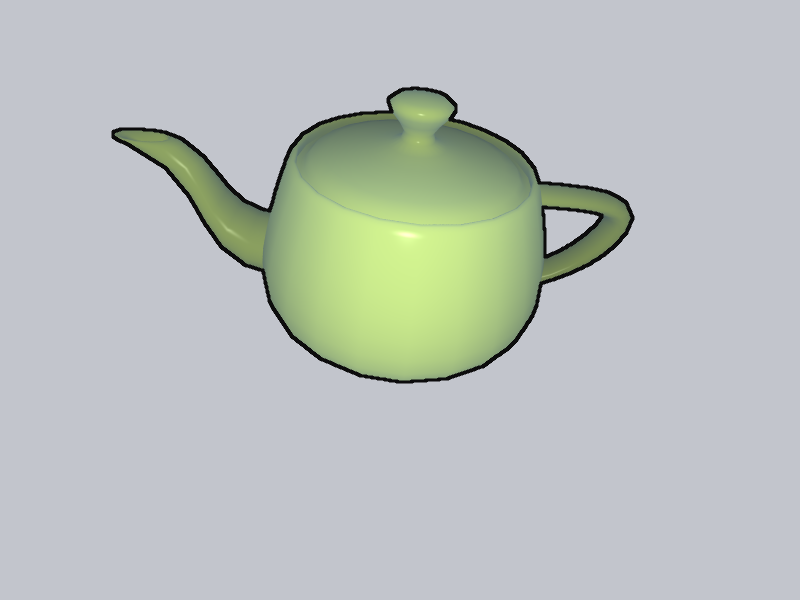
- Phong, cel-shading, Gooch, and two-tone shading
- Hard shadows, soft shadows (area light sampling), and fake soft shadows
- Anti-aliasing (jittering method)
- Primitives
- Plane
- Sphere
- Triangle
- Mesh
- Wavefront *.OBJ files
- Supports transforms
- Bounding volume hierarchy (BVH) - based on pbrt-v3
- Surface area heuristics (SAH)
- Can contain any primitives
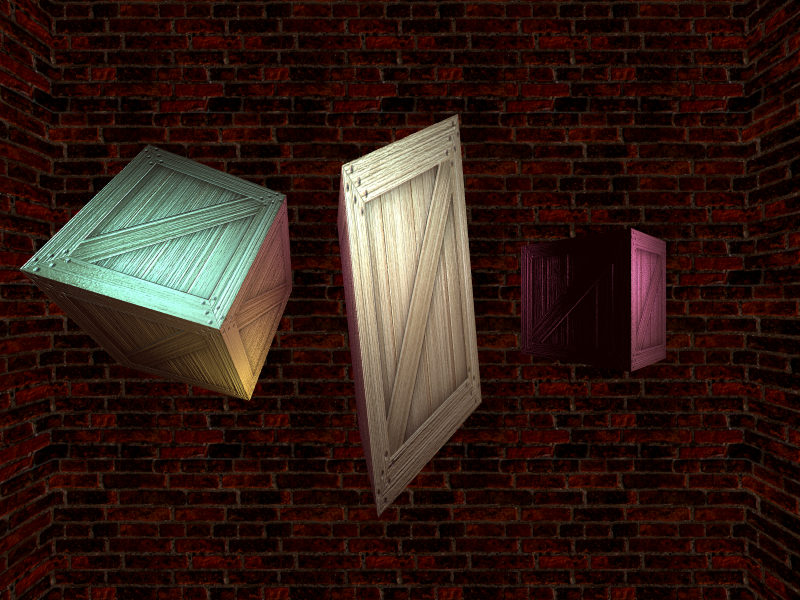
- Texture mapping
- Available for sphere, triangle, and plane UVs
- Normal mapping
- Bilinear and point filtering
- Cube maps
- Filters (kernel convolution)
- Laplacian, sharpen, unsharp mask, box blur, motion blur, smooth blur, Gaussian blur, and emboss
- Silhouette detection using Sobel filter
- Scene normal map and depth map
- Detects only external or full edges
- Image tools
- Posterize, brightness and contrast adjustment, grayscale, thresholding, and color inversion
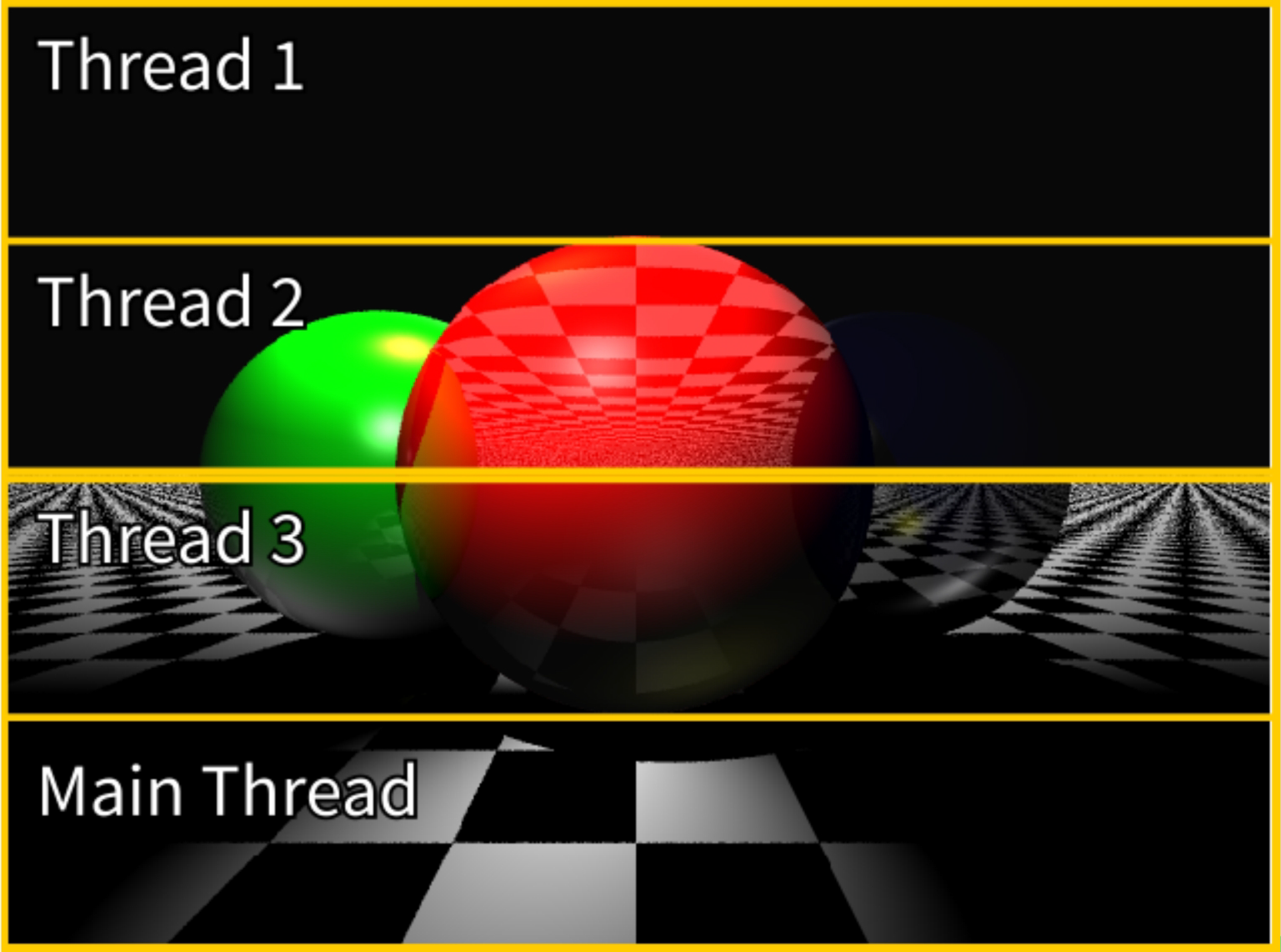
- Multi-threaded raytracing
- Screen space division or each line handled by a separate thread
Workflow
- Rays are traced from the observer to each pixel on a virtual screen.
- Each ray must test for intersections with scene objects.
- Upon intersecting with the nearest object, the color is calculated from light sources by examining the object's material properties and combining (or shading) the information to produce the final pixel color.
- Reflective, refractive, or translucent materials, and extensive shadow generation, will require additional rays to be traced.
Acceleration Structures
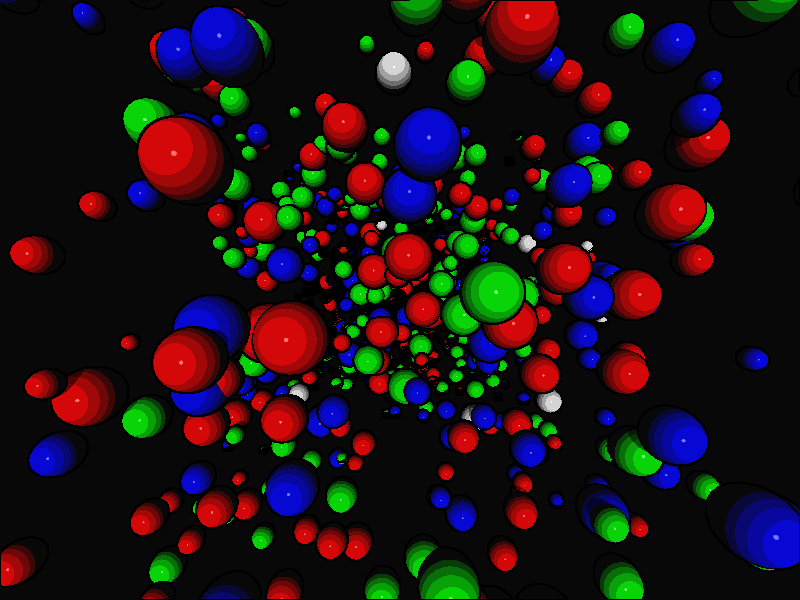
Rendering a scene with thousands of primitives using the traditional raytracer algorithm is very slow and impractical. To address this we can use acceleration structures!
There are many alternatives for these structures, but in this project, I chose to implement a Bounding Volume Hierarchy (BVH).
BVH is a spatial partitioning binary tree formed from "bounding volumes." Each object has a bounding volume that defines its maximum boundaries. There are several variations and optimizations for real-time use.
Optimizing
To optimize the rendering routine of the raytracer, consider these points. In this project, I added the following optimizations:
1. BVH - Surface Area Heuristics
This is a BVH division method that seeks to minimize the time spent during ray intersections. While building the BVH, it estimates whether to create a leaf node or divide the node by checking the child nodes.
The cost of each node is proportional to the area of the bounding volume and the number of primitives contained within the node. The optimal division minimizes the cost of each node, though this method increases the construction time of the BVH. This same algorithm is used in kD-trees.
2. Polygonal Mesh Subdivision
A specific BVH for meshes follows the same principle as the scene BVH, but creates a bounding volume for each polygon in a mesh.
.](/assets/img/work/screenshots/raytracer/raytracer_meshbvh.jpg)
3. Parallel Ray Tracing
To speed up the ray tracing process, the image buffer is subdivided among n threads. Each thread handles ray tracing for a portion of the buffer.
Future Improvements
There are several issues and potential improvements for this project:
- Create a UI for scene management (using imgui or a similar tool). Editing scene elements in .TXT files is cumbersome.
- Implement a node graph editor for shader materials that integrates with the raytracer engine and OpenGL.
- Improve the parallel raytracing to achieve the expected speedup. This requires further research.
- Gain additional speed by implementing the render routines on hardware accelerators such as CUDA and OpenCL
- Improve file loaders, such as the Wavefront *.OBJ loader, which can be slow in some cases. This requires optimization and handling of problematic meshes.
- Enhance error handling and include unit tests.
Code and References
Some Links and other user codes that helped me during development:
- Scrathpixel 2.0
- Computer Graphics Guide
- Bounding Volume Hierarchy
- Glavin001 / Raytracer
- flipcode
- pbrt-v3
- raycer
- Rossetacode / Image convolution
- songho.ca
- Sun & Black Cat
- tinyobjloader
- EuclideanSpace
Websites of data and resources sources: